双轮平衡小车
项目地址
https://github.com/we-worker/Balance_car
设备材料:
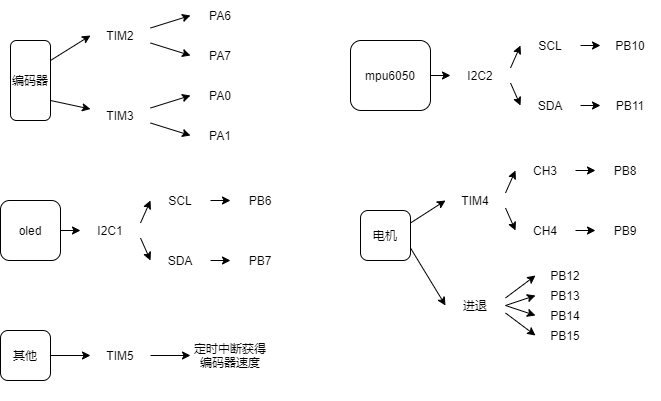
- STM32F103RCT6 –主控芯片
- MPU6050 –6轴姿态传感器
- L298N –电机驱动芯片
- GM37-520 *2 – 霍尔直流减速电机
- 0.72寸oled –屏幕
- 充电宝&3.7v升压模块 –供电
思路设计:
不同点
此项目完全使用hal库开发,每一个原件的控制基本都要改写。
踩坑点:
- 一开始没用过STM32CubeMX,忘记配置debug,
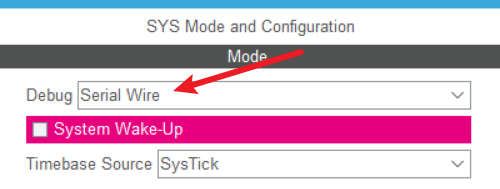 所以导致一写入程序,stm32就“废了”,需要通过更改boot其他启动方式才能下载程序。我一开始不知道,以为真坏了,又买了一个,又坏了,又买了一个导致最后买了近150元。
所以导致一写入程序,stm32就“废了”,需要通过更改boot其他启动方式才能下载程序。我一开始不知道,以为真坏了,又买了一个,又坏了,又买了一个导致最后买了近150元。
- oled显示的巨大延迟。这个问题导致我荒废消沉了好几天,pid怎么调都调不好。最后怀疑是oled显示导致各种姿态数据读取不及时,电机调节滞后,把oled显示的注释掉之后,果然出来了,哭死,太痛苦了。
- MPU6050的hal库移植真的麻烦,踩坑踩在了mpu6050的设备地址。
PID
这里的PID我只做直立部分,如果需要转弯的话,也是需要一个转向pid的。
直立环PD
直立环只使用了P和D
int balance(float Angle,float Gyro,float kp,float kd)
{
float Bias;
int balance;
Bias=Angle-0; // Angle减几就是平衡到哪个角度
balance=kp*Bias+Gyro*kd;
return balance;
}速度环PI
int velocity(int encoder_left,int encoder_right,float velocity_KP,float velocity_KI)
{
static float Velocity,Encoder_Least,Encoder,Movement = 0;
static float Encoder_Integral;
//=============speed PI controller=======================//
Encoder_Least =(MotorSpeed1+MotorSpeed2)-0;
Encoder *= 0.8;
Encoder += Encoder_Least*0.2;
Encoder_Integral +=Encoder;
Encoder_Integral=Encoder_Integral-Movement;
if(Encoder_Integral>1500)
Encoder_Integral=1500; //intergral limit
if(Encoder_Integral<-1500)
Encoder_Integral=-1500; //intergral limit
Velocity=Encoder*velocity_KP+Encoder_Integral*velocity_KI;
if(mpu_pose_msg.pitch<-30 ||mpu_pose_msg.pitch>30)
Encoder_Integral=0; //clean intergral if motor close
return -Velocity;
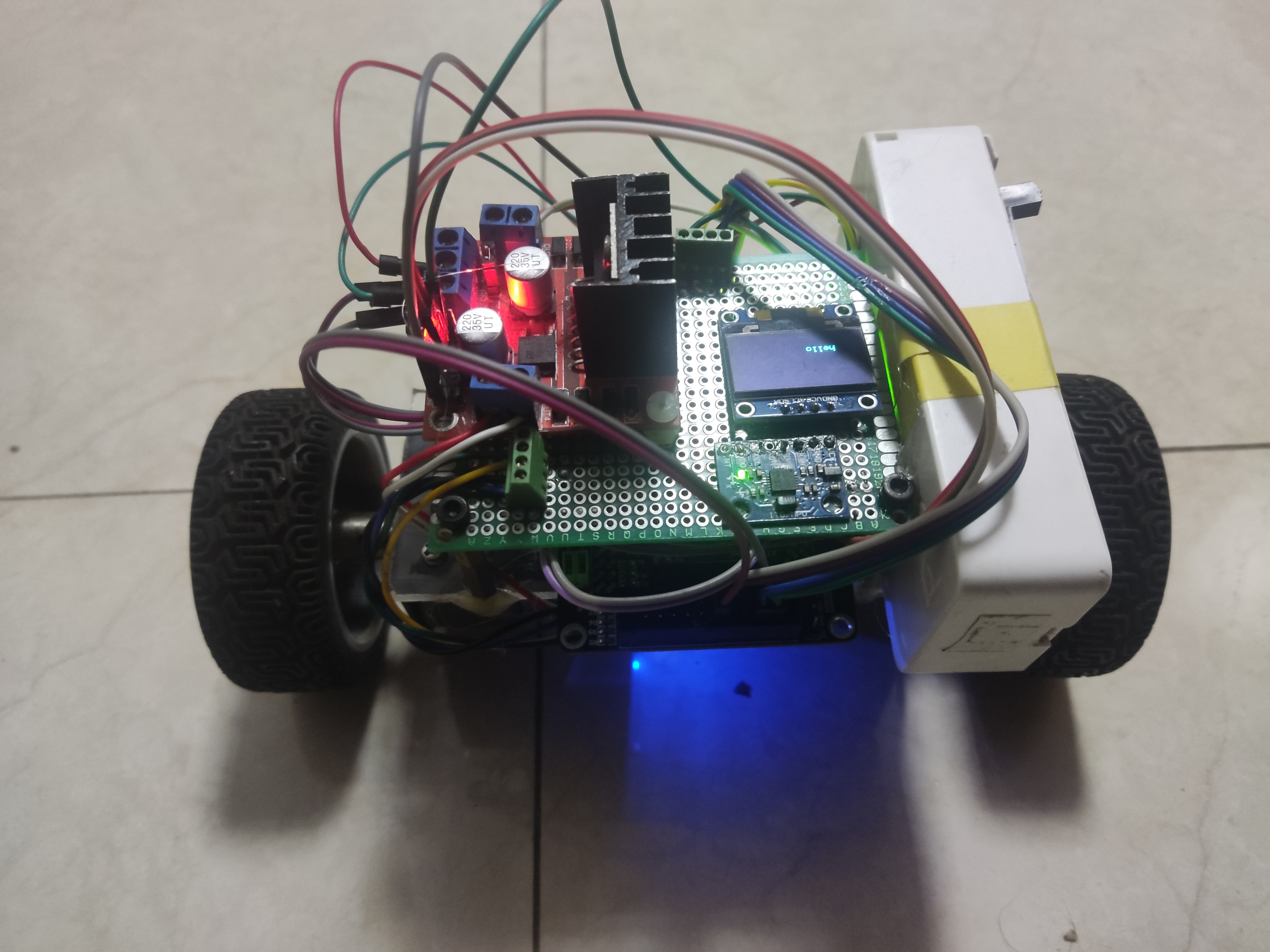
}成品展示
改进点
- 转向pid
- 直立pid优化
- 充电宝输出功率不太稳导致电机急速改变转速会直接断电源重启



